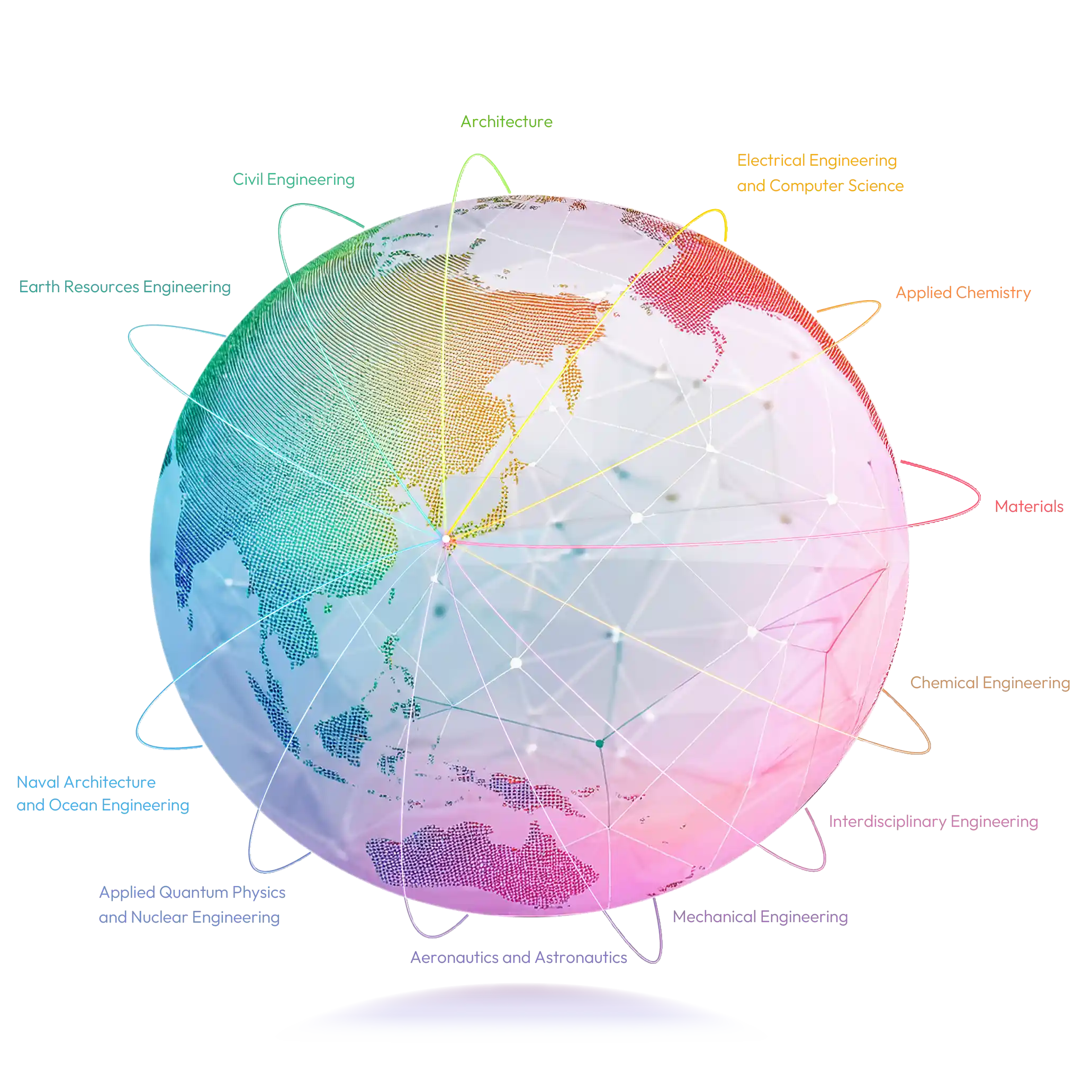
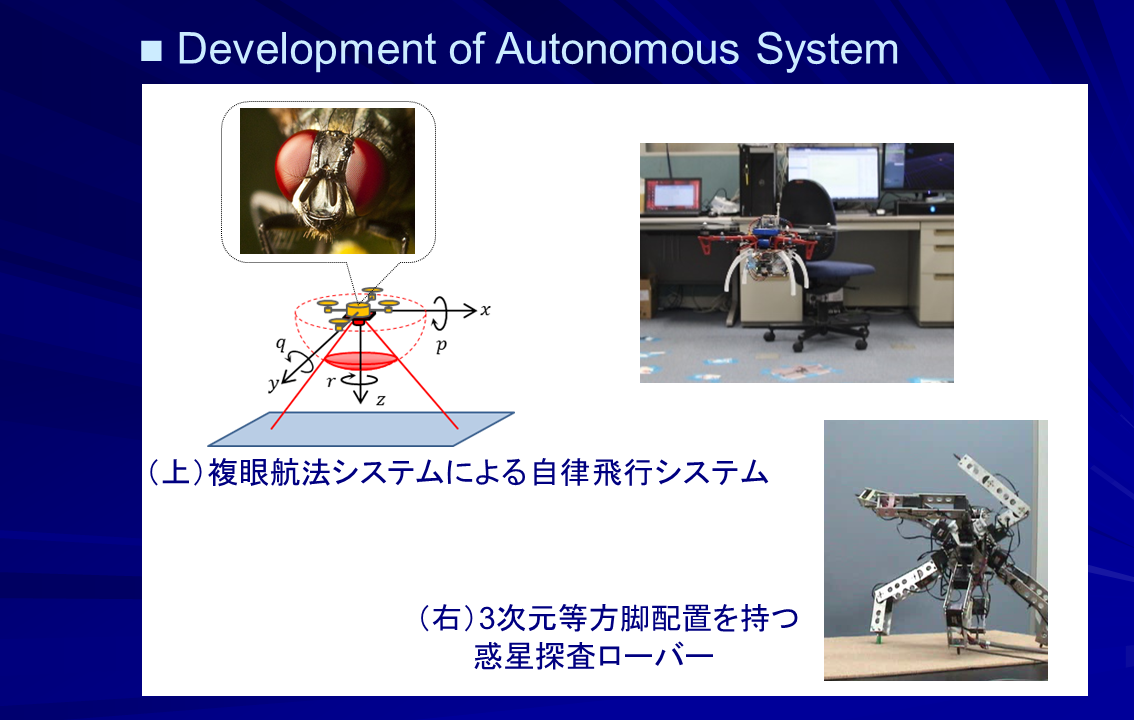
The Guidance and Control Laboratory does research on the control of spacecraft and autonomous systems. Our research aims are to develop new concept or theory based on new idea. One of our research themes is nonlinear control for systems with non-integrable constraints (: nonholonomic systems). Applying the nonlinear control allows to reduce the number of actuators to control the state variables of systems. The second one is research on autonomous vehicles, which can perform their missions in unknown environments. We are doing experimental research for planetary exploration rovers with unique shape, motion and environment recognition system mimicking compound eye of flying insects, and so on. The third is research on trajectory design for spacecraft. Because the requirements for space missions become complicate year by year, we combine control theories with space dynamics to design and control the trajectories of spacecraft. Cultivating a new concept or theory and developing its realistic procedure is goal of the research.
Member
The Main Research Topics
Control of Nonlinear Systems with Nonholonomic Constraints
Research and Development of Autonomous Systems (Planetary Exploration Rover, Compound Eye Navigation System, etc.)
Trajectory design for Deep Space Exploration Missions, etc.